Cellesprøjtning af ukrudt i majs
2 Udvikling af metode til detektering af ukrudt ved hjælp af vision
Da der ikke allerede findes metoder, software eller udstyr, der direkte kan anvendes til detektering af ukrudt i majs med henblik på ukrudtssprøjtning på decimeterniveau, har det i dette projekt været nødvendigt at udvikle metoder og software til denne opgave.
Vi har valgt at detektere ukrudtet ved hjælp af et computervision-system, dvs. et system bestående af kameraer, der er forbundet til et computersystem med digital billedbehandlingssoftware installeret. Systemet opbygges således, at kameraerne løbende optager billeder af markoverfladen foran sprøjtesystemet. Disse billeder sendes til computeren, der ved hjælp af billedbehandlingssoftwaren finder frem til de felter på markoverfladen, hvor der forekommer ukrudt. Computeren sørger herefter for at aktivere de relevante sprøjtedyser, så ukrudtet bliver sprøjtet.
2.1 Billedoptagelse i majs
Udviklingen af en metode til ukrudtsdetektering i majs er baseret på billeder taget i tre konventionelt drevne majsmarker. Værterne for disse billedoptagelser blev udpeget af Dansk Landbrugsrådgivning. Optagelserne blev foretaget i maj og juni 2006.
Billederne blev taget på seks forskellige dage over en fire ugers periode fra to til seks uger efter såning, hvor majsplanterne udviklede sig fra en højde på 2-4 cm til en højde på 10-30 cm. Første optagelse skete før første ukrudtssprøjtning, medens senere optagelser skete på såvel sprøjtede som usprøjtede parceller. Ved at optage billeder fra både sprøjtede og usprøjtede parceller opnåede vi et vidtspændende datamateriale, hvad angår ukrudtstæthed.
Der blev både optaget billeder med kameraet rettet lodret ned mod jordoverfladen (ortogonale optagelser) og med kameraet rettet i en skrå vinkel ned mod jordoverfladen (perspektiviske optagelser, sigteretning 48° fra lodret). De ortogonale optagelser udgjorde det primære datamateriale, men på de tidligste optagetidspunkter var majsplanterne svære at se lodret ovenfra pga. deres ringe vandrette udbredelse. Derfor blev der også lavet perspektiviske optagelser, hvor majsplanterne fremtrådte tydeligere pga. af deres højde.
Ved udgangen af juni var der optaget ca. 600 billeder repræsenterende varierende vækststadier af majsen og varierende ukrudtstæthed. Figur 6 viser tre billedeksempler, hvoraf to er taget to uger efter såning, og det tredje er taget seks uger efter såning.
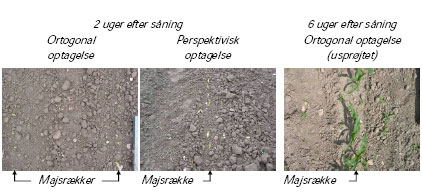
Figur 6. Farvebilleder optaget i majs på henholdsvis et tidligt udviklingstrin (de to billeder til venstre) og et senere udviklingstrin (billedet til højre).
2.2 Metode til ukrudtsdetektering
Der er udviklet en metode til detektering af ukrudt i majs baseret på digitale farvebilleder taget med kameraet rettet lodret ned mod jordoverfladen (ortogonale optagelser). Metoden er baseret på tidligere arbejder vedrørende detektering af ukrudt i korn og sukkerroer (Søgaard & Olsen, 2003; Søgaard, 2005). Metoden forløber i følgende trin:
- Billedet modtages fra kameraet
- Grøn vegetation i billedet (afgrøde og ukrudt) fremhæves vha. en lineær farvekontrast baseret på den røde, grønne og blå farveintensitet i hver pixel: 2 ´ grønintensitet – blåintensitet – rødintensitet (Søgaard & Olsen, 2003).
- Billedet segmenteres, ved at pixels, for hvilke den lineære farvekontrast overstiger en given tærskelværdi, klassificeres som pixels indeholdende grøn vegetation.
- Rækken (eller rækkerne) af afgrødeplanter i billedet fastlægges og rækkens (rækkernes) midterlinie(r) bestemmes (Søgaard & Olsen, 2003).
- Grøn vegetation, der rører rækkerlinien/-linierne klassificeres som afgrødeblade, mens øvrig grøn vegetation antages at være ukrudt, herefter benævnt ’detekteret ukrudt’.
- Der indlægges et rektangulært netværk i billedet med given cellestørrelse, fx 3 ´ 10 cm henholdsvis på langs og tværs af kørselsretningen. I hver celle i netværket estimeres den arealmæssige ukrudtsdækning.
- De celler, i hvilke den estimerede ukrudtsdækning overskrider en indstillet tærskelværdi, fx 25 mm², markeres med henblik på sprøjtning.
Ved tidlige sprøjtninger, hvor majsplanterne har en ringe arealmæssig dækning af jordoverfladen, vil det være hensigtsmæssigt at udelade trin 4 og 5, således at al grøn vegetation opfattes som ukrudt, der skal sprøjtes. Ved brug af trin 4 og 5 vil der nemlig være en stor risiko for, at ukrudt inde i majsrækken fejlagtigt klassificeres som majs og dermed ikke vil udløse en sprøjtning. Dette vil ikke være hensigtsmæssigt, da det er vigtigt, at alt ukrudt sprøjtes, når majsen er på dette tidlige vækststadium. Senere i vækstforløbet, hvor majsplanterne dækker en større del af jordoverfladen, vil det derimod være relevant at benytte trin 4 og 5 og dermed undgå at sprøjte majsen, så forbruget af sprøjtemiddel minimeres. Et forhold, som taler for sprøjtning i afgrøderækken er, at det er de ukrudtsplanter, som er tættest på afgrødeplanterne, som har størst konkurrenceevne over for afgrøden og dermed er mest uønskede i marken.
Der er to ydertilfælde, hvor det kan være umuligt at fastlægge majsrækkerne via trin 4. Det ene tilfælde er, hvis der er en dårlig fremspiring af majsen på det pågældende sted i marken. Det andet tilfælde er, hvis ukrudtstætheden er så høj, at en meget stor procentdel af billedet er grønt, og rækkerne dermed ikke fremstår tydeligt. I begge disse tilfælde vil strategien være at opfatte al grøn vegetation som ukrudt, der skal sprøjtes, da man derved opnår den sikreste ukrudtsbekæmpelse.
Ved en indledende billedbehandling blev det konstateret, at det var muligt at fastlægge majsrækkerne i alle ortogonalt optagne billeder; både i billederne fra det tidligste udviklingstrin (ex figur 6 t.v.), hvor majsplanterne havde en ringe arealmæssig dækning af jordoverfladen, og i billederne fra senere udviklingstrin, hvor ukrudtstætheden i de usprøjtede parceller var høj (ex figur 7). Dermed kan det konkluderes, at kameraet i det endelige sprøjtesystem kan monteres, så billederne optages ortogonalt. Det er en klar fordel, da perspektiviske optagelser med et skråtstillet kamera ville indebære, at der skulle indføres ekstra beregninger i billedbehandlingssoftwaren, der skulle foretage en geometrisk perspektivopretning, hvilket ville betyde en lavere fremkørselshastighed.

Figur 7. Eksempel på rækkelinier (lodrette blå linier) detekteret i billede med stor ukrudtstæthed.
I figur 8 er vist et eksempel på resultater, der opnås ved anvendelse af den digitale billedbehandlingsprocedure. Det fremgår heraf, at proceduren detekterer en del små ukrudtsplanter, som det umiddelbart er vanskeligt at få øje på i det optagne farvebillede. Desuden ses enkelte eksempler på fejlklassificering, dvs. ukrudt klassificeres som majs og omvendt. Mht. markering af celler til sprøjtning ses, at en enkelt ukrudtsplante i visse tilfælde kan give anledning til sprøjtning af to celler.
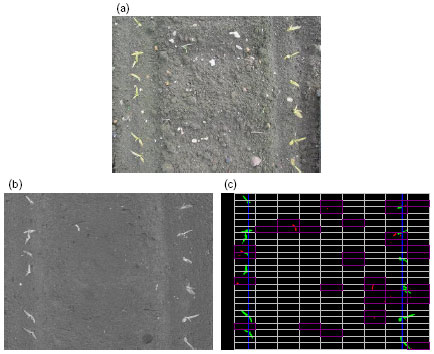
Figur 8. Eksempel på digital billedbehandling af billede ifølge de 7 trin i den beskrevne procedure. (a) Det modtagne farvebillede fra kameraet (trin 1). (b) Lineær farvekontrastbillede, der fremhæver grøn vegetation som lyst (trin 2). (c) Segmenteret billede med detekteret ukrudt og majsblade fremhævet med henholdsvis rødt og grønt (trin 3); de lodrette blå linier angiver de detekterede rækkelinier (trin 4 og 5); de lyse lodrette og vandrette linier angiver det indlagte rektangulære netværk (trin 6); de violette rektangler angiver netværksceller markeret til sprøjtning.
Figur 9 viser eksempler på rækkebaseret diskriminering på et tidligt og et senere udviklingstrin af majsen. Som det fremgår er der på det tidlige udviklingstrin væsentlig risiko for at fejlklassificere majsplanterne og derved gå glip at en mulig sprøjtemiddelbesparelse. Samtidig er der ukrudt inde i rækkerne, der fejlklassificeres som majs og derfor ikke bliver sprøjtet. Ud fra disse iagttagelser kan der være argumenter for at undlade at forsøge at diskriminere mellem ukrudt og majs på det tidlige udviklingstrin og i stedet sprøjte al grøn vegetation. En yderligere fordel ved dette er, at der derved bliver sprøjtet forebyggende mod ukrudt omkring majsplanterne. På senere udviklingstrin (figur 9c og 9d) vil sprøjtning af alt grønt derimod føre til kontinuerlig sprøjtning af hele majsrækken, dvs. en stribe på en til to måske nogle steder op til tre sprøjtecellers bredde (10-30 cm). Derfor kan det i sådanne tilfælde være mere hensigtsmæssigt at foretage en rækkebaseret diskriminering mellem majs og ukrudt for at spare ukrudtsmiddel.
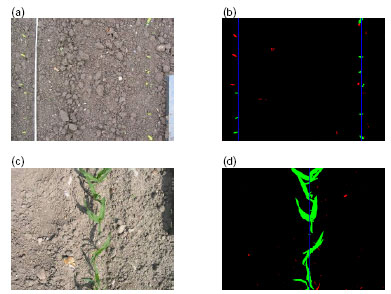
Figur 9. Eksempler på rækkebaseret diskriminering mellem ukrudt og majs. (a) Majs på tidligt udviklingstrin. (b) Detekteret ukrudt (rødt) og majs (grønt) svarende til billede (a). (c) Majs på senere udviklingstrin. (d) Detekteret ukrudt (rødt) og majs (grønt) svarende til billede (c). De lodrette blå linier er detekterede rækkelinier.
Version 1.0 Oktober 2008, © Miljøstyrelsen.