Cellesprøjtning af ukrudt i majs
3 Cellesprøjtesystemet
- 3.1 Kameraer
- 3.2 Computer
- 3.3 Mikroprocessor
- 3.4 Sprøjtebom
- 3.5 Programmering af computervisionsystem
- 3.6 Dataopsamling
- 3.7 Demonstration af det integrerede system
I projektet opbygges og analyseres et realtids visionbaseret sprøjtesystem med en integreret enhed til automatisk opsamling af sprøjtetekniske data. Dette sprøjtesystem benævnes cellesprøjte, idet der udelukkende sprøjtes i de områder eller celler på marken, hvor der forekommer ukrudt. Alle områder uden ukrudt sprøjtes således ikke. En principskitse af cellesprøjtesystemet er vist i figur 10.
Cellesprøjten er forsynet med et sæt videokameraer i et visionsystem, der fotograferer markoverfladen umiddelbart foran sprøjtebommen. Det optagne billede analyseres for forekomsten af ukrudt. Når der findes en eller flere ukrudtsplanter i billedet, gemmes oplysninger om de steder, hvor de findes. Det kan udtrykkes således, at der fremstilles et lille og meget lokalt sprøjtekort over ukrudtsforekomsten.

Figur 10. Principskitse af visionbaseret cellesprøjte. ( ![]() angiver sprøjtede celler)
angiver sprøjtede celler)
Til hvert kamera hører en applikationsenhed bestående af sprøjtedyser, som er monteret på en bom. Dette er specielt ved at dyserne sidder med ret kort indbyrdes afstand, og at bommen er monteret relativt tæt på jordoverfladen. Spredeviften fra hver dyse dækker en ganske kort afstand på jordoverfladen set på tværs af køreretningen. Yderligere er hver dyse forsynet med sin egen magnetventil, således at de kan aktiveres individuelt og i ganske korte tidsintervaller. Dette betyder, at en bestemt dyse kan aktiveres, netop når den befinder sig over det lille areal (sprøjtecelle), hvor der ifølge det før omtalte lokale sprøjtekort vokser en ukrudtsplante. Denne bliver derfor behandlet, mens de naboceller, som ikke indeholder ukrudt, ikke bliver sprøjtet. Størrelsen af disse celler er, for det aktuelle design, 107 mm på tværs af og 30 mm i køreretningen.
Når cellesprøjten bevæger sig hen over marken, bliver hele det overkørte areal fotograferet med billede efter billede. Hvert eneste billede bliver ved brug af en computer opdelt i celler og analyseret, men kun celler med ukrudt bliver sprøjtet. Den anvendte computer kan indhente billeder fra tre kameraer, som hver dækker 750 mm på tværs af køreretningen, svarende til én rækkeafstand. Cellesprøjtens samlede arbejdsbredde bliver således 2,25 m, men kan udbygges med flere tre rækkes moduler. Dette modul er monteret på en automatiseret platform med rækkestyringssystem, figur 11. Alle kameraerne udløses samtidig, og billederne føres efter tur ind til analyseprogrammet. Efterhånden som analysen – og dermed de lokale sprøjtekort, et for hvert kamera - er klar, føres resultaterne over til en mikroprocessor.
Denne forsynes også med det estimerede tidspunkt, hvor rækken af celler befinder sig lige under sprøjtebommen. Tidspunktet bestemmes ud fra sprøjtens aktuelle hastighed, som aflæses ved hjælp af et signal fra det køretøj, den er monteret på. Dermed har mikroprocessoren information om, hvilke celler der skal sprøjtes, og hvornår dette skal ske, og den overtager dermed ansvaret for processens videre forløb. I og med at mikroprocessoren overtager den tidskritiske del af processen, bliver computeren frigjort, således at den får bedre tid til at tage det næste sæt billeder inden sprøjten er kommet for langt frem.

Figur 11. En tre rækket cellesprøjte monteret på en autonom enhed
Informationsstrømmen i systemet går fra kameraerne til computeren, til mikroprocessoren og til ventilerne på sprøjtebommen. Dette er skematisk vist i figur 12.
Figur 12. Skematisk fremstilling af informationsstrømmen i cellesprøjtesystemet
Fra kameraerne til computeren er der tale om farvebilleder med en opløsning på 780 x 580 pixel (billedpunkter). Mellem computeren og mikroprocessoren foreligger informationen som datapakker, der indeholder tidspunkt for sprøjtning, samt hvilke dyser, der skal aktiveres. Endelig går der, fra mikroprocessoren til sprøjtebommen, 21 signalledninger, én til hver dyseventil.
3.1 Kameraer
De tre kameraer er af mærket AVT Marlin F-046C, og følger IEEE 1394 standarden (FireWire) ved overførsel af billederne til computeren.
Overførselshastigheden gennem FireWire kanalen er 400 Mbit/s. Kameraerne er monteret i en højde på 1,05 m over jordoverfladen og er lodret orienterede, hvorved billederne får en kalibreringsfaktor på 1 mm/pixel. Det er ikke hele billedet, som overføres fra hvert kamera, men kun det midterste rektangulære udsnit på 750 x 180 mm på jordoverfladen. Denne metode er valgt for at spare tid ved billedoverføringen. Alle tre kameraer udløses samtidig. Det er dog kun det første, som overfører sit billede umiddelbart efter eksponeringen, de 2 andre gemmer deres billeder internt. Når computeren har fået hele billedet fra det første kamera, startes overføringen fra det andet, og overføringen foregår derfor samtidig med at computeren analyserer billedet fra det første. Den samme teknik anvendes derefter igen, således at analysen af billedet fra kamera to foregår sideløbende med overføringen fra kamera tre.
I forbindelse med overføringen måler computeren billedernes lysværdi. Såfremt det indkomne billede afviger fra den erfaringsvis passende værdi, justeres kameraernes eksponeringstid op eller ned, således at de efterfølgende billeders lysværdi nærmer sig den ønskede værdi. Man opnår herved at kompensere for de ændringer i lysets intensitet, som kan forekomme på grund af f.eks. ændringer i skydækket.
3.2 Computer
Systemets computer består af et bundkort af typen mini-atx bestykket med en processor, som drives med en klokke på 2,8 GHz. Kortet er bestykket med porte for parallel og seriel dataoverføring samt en ethernet forbindelse. Harddisken er en 2,5 tommers type med en kapacitet på 60 Gb.
Computeren kan skematisk opfattes som vist i figur 13. Billederne hentes ind fra kameraerne via Firewireportene. De analyseres og det lokale sprøjtekort beregnes. Data fra dette kort kommunikeres ud til mikroprocessoren gennem en parallel port.
Figur 13. Skematisk fremstilling af cellesprøjtens computer
3.3 Mikroprocessor
Den anvendte mikroprocessor er af fabrikatet Atmel type ATMEGA8515. Denne processor er forsynet med 4 porte, som hver omfatter 8 bits, hvor alle kan omstilles til at virke som enten input eller output. Mikroprocessoren får sine data fra computerens parallelle port gennem sin Port A. Efter databehandlingen overføres resultatet til sprøjtebommen gennem portene B, C og D. Figur 14 viser en skematisk fremstilling af mikroprocessoren.
Figur 14. Skematisk fremstilling af mikroprocessoren
3.4 Sprøjtebom
Den opbyggede sprøjtebom er forsynet med 21 hydrauliske dyser, der er monteret med en indbyrdes afstand på 107 mm. Syv dyser dækker en bredde på 750 mm, svarende til rækkeafstanden i majsmarken. Hver dyse er forsynet med en magnetventil, som kan åbne eller lukke for væskestrømmen til dysen med få millisekunders intervaller. Magnetventilerne er af fabrikatet OmniFit med typebetegnelsen 038T2S12-54-4, 2WAYS NC.
Magnetventilerne styres fra mikroprocessorens porte B, C og D således at hver port styrer syv ventiler. Der anvendes således kun syv af de otte bits fra hver port. Signalerne fra hver bit styrer den modsvarende ventil gennem en drivkreds bestående af en MOSFET-transistor af type RFP12N10L for at give signalet tilstrækkelig styrke til at manøvrere ventilen. Figur 15 viser en principskitse af arrangementet.
Figur 15. Principskitse af drivkreds og magnetventil for en dyse
3.5 Programmering af computervisionsystem
Computeren kører under operativsystemet Debian (Debian, 2007), som er baseret på en Linuxkerne. Begge dele er ”open source”-software. Programmerne for computeren er udviklet i sproget C, og for mikroprocessoren i dens assemblersprog. Den nuværende udgave af programmet er en udviklingsversion og forudsætter derfor kommunikation med en operatør via tastatur og skærm. For et færdigt system skal dette naturligvis ændres, således at programmet starter automatisk.
Ved starten skal programmet forsynes med tre styreparametre:
1. Kørehastighed i meter per sekund
2. En parameter, som angiver, hvorvidt afgrøderækken skal sprøjtes eller ej
3. En parameter, som bestemmer, om begge celler eller kun den ene skal sprøjtes, hvis der findes ukrudt på grænsen mellem dem.
Programmet er forberedt til at kunne hente kørehastigheden fra det køretøj, traktor eller autonom enhed, som cellesprøjten er monteret på. Når programmet starter, etablerer det først forbindelserne gennem firewireportene ud til kameraerne. Derved tælles der, hvor mange kameraer der er tilkoblede. Programmet kan således udmærket arbejde med et mindre antal kameraer end de tre, som er maksimum ved det opbyggede testmodul. Dog skal der altid være mindst ét kamera tilkoblet. Hvis der f.eks. kun er to kameraer indkoblet anvendes den sektion af sprøjtebommen, som modsvarer det tredje kamera naturligvis ikke.
Ved programstarten etableres der forbindelse til mikroprocessoren via computerens parallelport, og der overføres en kommando, som får mikroprocessoren til at indtage en bestemt, veldefineret tilstand. Efter at starten er gennemløbet, går programmet ind i en uendelig løkke som kun kan brydes ved en kommando fra operatøren. Første trin i denne løkke består i, at alle kameraer samtidig får besked på at tage et billede. Umiddelbart derefter aflæses den aktuelle tid fra computerens ur.
Udvikling af metoden til detektering af ukrudt er beskrevet i kapitel to, og selve programmeringen af computervision systemet fremgår af nedenstående. Det første trin i billedanalysen består i at kombinere de tre farvekanaler rød (R), grøn (G) og blå (B), således at der fremkommer et billede, hvor de grønne planter fremhæves som ganske lyse, mens resten bestående af jord, sten, tørre strå og lignende forsvinder ind i den mørke baggrund. Beregningen følger formlen:
A = 2*G – R – B,
hvor A symboliserer det resulterende billede. Denne beregning skal altså gennemføres for hvert punkt i billedet. Metoden er beskrevet i Woebbecke et al. (1995).
A-billedet skal nu omdannes til et såkaldt binært billede, hvor alle billedpunkter er enten absolut sorte eller absolut hvide. Dette gøres ved at sammenligne hvert punkt med en såkaldt tærskelværdi, som er empirisk bestemt ud fra billedets lysværdi. Derfor er det vigtigt, at kameraerne løbende indstilles således, at billedernes lysværdi forbliver konstant, selvom der f.eks. går en sky for solen. Hvis et givet punkt i A-billedet har en værdi som er større end tærskelværdien, bliver punktet hvidt og ellers sort. I det binære billede fremstår således alle grønne planter som hvide mod en sort baggrund.
Hvis programmets anden styreparameter er sat til, at afgrøderækken ikke skal sprøjtes, bliver næste opgave nu at bestemme rækkens position. Dette gøres ved en metode, som er beskrevet af Søgaard & Olsen (2003). Kort fortalt består den i at summere alle billedets punktværdier fra top til bund. Derved fremkommer en kurve, som vil have maksimum dér, hvor rækken befinder sig. Rækkens position i det aktuelle billede fastlægges ganske nøjagtigt ud fra kombinationen af
- kendskab til rækkeafstanden
- kameraerne er monteret således, at rækken er nogenlunde lodret i billederne
- kendskab til, hvor rækken befandt sig i de nærmest foregående billeder.
Der lægges nu en linje ned i billedet oven i rækken og alle planter, som rører denne linje, fjernes fra billedet og sprøjtes derfor ikke.
Det skal bemærkes, at denne metode medfører, at en ukrudtsplante, som står inde i rækken, og som rører ved linien, også bliver kategoriseret som afgrøde. Dette er naturligvis en fejl, men alternativet vil indebære en formanalyse af planterne, og dette vil være meget tidskrævende for computeren. Derfor er det besluttet, i denne programversion, at acceptere denne mulige fejl-kategorisering.
Billedet opdeles i rektangulære enheder (celler) på 30 mm i kørselsretningen og 107 mm på tværs. Da kameraerne er fast monteret i forhold til sprøjtebommen, kan cellerne placeres, således at dyserne – med en vis tidsforsinkelse – kommer til at passere hen over midten af hver celle. De celler, som ligger ved siden af hinanden i et bånd på tværs af kørselsretningen kommer således til at befinde sig under sprøjtebommen samtidigt.
Kameraerne er anbragt i en sådan højde over jorden, at billederne rummer seks celler i køreretningen og syv celler på tværs af kørselsretningen, hvilket svarer til billedfeltet for ét kamera. Hvert billede bliver altså opdelt i 6*7 = 42 celler, som skal analyseres hver for sig. Systemet er skitseret øverst på figur 16.
Der oprettes et sprøjtekort som, for hvert kamera, bare indeholder syv værdier, én for hver celle på tværs af køreretningen. Analysen af hver celle består i at bestemme, hvorvidt der er nogle hvide billedpunkter indenfor den pågældende celle. Hvis dette er tilfældet, sættes den pågældende værdi i sprøjtekortet til 1, hvilket betyder at cellen skal sprøjtes. I modsat fald sættes værdien til 0, og cellen forbliver usprøjtet.
Hvis der findes ukrudt på grænselinjen mellem to celler, afgøres det, ud fra programmets tredje styreparameter, hvorvidt begge celler skal mærkes for sprøjtning eller kun den, hvor den største del af ukrudtet befinder sig.
Når programmet er færdigt med en række af celler, beregnes på hvilken tid disse befinder sig lige under sprøjtebommen. Denne tid beregnes ud fra billedeoptagelsestiden, kørehastigheden og afstanden fra kameraerne til sprøjtebommen samt hvor lang tid billedanalysen har taget. Tiden samt det sprøjtekortet overføres til mikroprocessoren, som derefter foretager den egentlige sprøjtning.
Figur 16. Skematisk fremstilling af cellesprøjtesystemet for ét kamera.
Mikroprocessoren får sine data ind til port A fra computerens parallelport som vist i figur 13 og 14. Den datastruktur, som overføres, består af en pakke som først indeholder et synkroniseringstegn, derefter en tidsværdi og endelig tre tegn for ventilstyringen. Disse tre tegn for styringen kontrollerer hver sin sektion af sprøjtebommen svarende til hvert kamera.
I mikroprocessoren er der programmeret et ur, som kører med en frekvens på 2 kHz, svarende til et ”clocktick” for hver halve millisekund. Denne tid udgør den unøjagtighed, med hvilken magnetventilerne åbnes eller lukkes. Hvis man tænker sig, at sprøjten kører med en hastighed på en meter per sekund, svarende til 3.6 km/time, kommer dette halve millisekund til at svare til en halv millimeter kørestrækning. Denne usikkerhed i sprøjtedouchens placering er bedømt som værende acceptabel.
De indkommende datapakker bliver lagt ind i starten af en buffer i den orden de ankommer. Samtidig holder processoren øje med tidsværdien for de gamle pakker, som efterhånden kommer til at befinde sig i enden af bufferen. Når den aktuelle tid stemmer overens med værdien i den sidste pakke i bufferen, åbnes eller lukkes magnetventilerne på sprøjtebommen som de tre styringstegn angiver, og denne datapakke markeres som forbrugt.
For at bufferen ikke skal vokse ud over alle grænser er den udformet som en ringbuffer, således at pladsen for de forbrugte datapakker efter en tid bliver genbrugt til nyankomne. Figur 17 viser en enkel skitse af princippet.
Man kan opfatte det således, at den aktive del af ringbufferen, vist som den midterste del af figur 17, indeholder det lokale sprøjtekort for det område på marken, som befinder sig mellem kameraernes billedfelter og sprøjtebommen.
Figur 17. Skematisk fremstilling af mikroprocessorens ringbuffer. Nye datapakker bliver lagt til i nederste ende af bufferen, mens de øverste bliver eksekverede efterhånden som deres tidsværdier indtræffer. Når bufferen ikke rækker længere begyndes forfra.
3.6 Dataopsamling
I forbindelse med at cellesprøjten kører over marken og kontinuerligt både registrerer tilstedeværelsen af ukrudt på celleniveau og samtidig optager et billede af ukrudtet, forekommer det fornuftigt at indsamle denne information og lagre den for en evt. fremtidig anvendelse. Et eksempel på senere anvendelse kunne være til konstruktion af et detaljeret ukrudtskort over marken, hvilket kunne bidrage til et bedre valg af ukrudtsmidler og minimering af herbicidforbruget i såvel majsafgrøden som evt. andre afgrøder, der måtte dyrkes i sædskifte med majsen.
Rent teknisk foregår dette ved, at de optagne billeder samt styringsinformationen, der viser om dyserne var åbne eller lukkede, løbende opsamles og geokodes ved hjælp af en GPS-modtager monteret på sprøjten. Systemet er udviklet, så brugeren kan benytte hvilken GPS-modtager, der ønskes. Dermed bestemmer brugeren også selv præcisionen på de GPS-data, der bliver kodet med sprøjteoplysningerne. I stedet for alene at lagre disse data lokalt ude på sprøjten f.eks. på et hukommelseskort, videresendes data i udgangspunktet via mobilnettet til en central database til efterfølgende dokumentations- og analyseformål.
Første opgave i denne sammenhæng var at fastlægge formatet for dataoverførslen. De tre mest anvendte kommunikationsprotokoller for datatransmission indenfor jordbrug; AgroXML (Stardardized Data Exchange in Farm Management Information Systems), F.O.D.M (Field Operations Data Model) og ISO 11783-10 (Serial control and communications data network) indgik i den endelige analyse. Alle tre protokoller bygger på XML (eXtended Markup Language). I analysen indgik en faglig vurdering af de tre formaters egnethed til overførsel af data i nærværende projekt. Det vægtede også tungt at vælge en kendt og bredt accepteret protokol i projektet. Resultatet af analysen viste, at ISO 11783-10 både opfylder de stillede krav i projektet og samtidig er protokollen så generisk opbygget, at den også kan håndtere en bred vifte af fremtidige udvidelser. Endvidere vurderes ISO-protokollen at få størst udbredelse i hhv. Danmark og Europa på længere sigt.
Næste opgave var at udvikle et softwareprogram til dataopsamling og overførslen af data til den centrale database. Til dette blev der i projektet udviklet et softwareprogram til afvikling på en j2me (java 2 micro edition) platform. Fordelen ved at anvende java-platformen er, at softwaren kan køres på mange forskellige hardware-enheder, så længe de understøtter j2me. Java er det, man kalder platformuafhængig. Systemet er et realtime-system, der videresender data kontinuerligt i takt med, at de opsamles. Alle opsamlede data får et tidsstempel og en geokodning, inden de sendes. Softwaren håndterer både dataoverførsel via mobilnettets GPRS-system (General Packet Radio Service) og trådløst netværk, WLAN (Wireless Local Area Network). Fordelen ved dette er, at man sikrer, at systemet altid udnytter den bedst tilgængelige båndbredde til transmission af data. Er der adgang til et højhastigheds trådløst netværk, f.eks. i nærheden af gården, anvendes dette. Ellers sendes data via GPRS. Skulle der hverken være WLAN- eller GPRS-dækning, gemmes data lokalt på hardwareenheden, til der igen kan oprettes forbindelse, hvorefter de ophobede data sendes. Eftersom disse små hardwareenheder som regel har begrænset diskplads lokalt, er softwaren udviklet så den - i tilfælde af længere perioder uden netværksdækning - kun vil lagre sprøjtedata for at sikre dokumentationen.
For at demonstrere java-softwarens uafhængighed af hardwareplatformen, er dataopsamlingsmodulet installeret og testet på 3 forskellige hardware-enheder:
- Siemens XT65 (figur 18)
- Hyline HCP65-G
- PSION Workabout Pro

Figur 18. Siemens XT65 dataopsamlingsmodulet
Simens XT65 og Hyline HCP65-G ligner hinanden, hvad angår specifikationer. For dem begge gælder følgende:
- Quad-Band
- GPRS Class 12
- Java imp-ng
- Kraftig processor (ARM© Core, Blackfin© DSP)
- Stor hukommelse (400 kb ram, 1,7 Mb flash)
- TCP/IP
- Mange interface muligheder (USB, RS232, I2C, SPI, m.fl.)
PSION Workabout Pro er noget større end de to andre og adskiller sig på flere måder, hvoraf især kan nævnes, at den kører med Windows mobile 2003 som styresystem, og at den som den eneste i testen har WLAN. Følgende kan siges om Workabout Pro’en:
- Windows Mobile 2003 styresystem
- 400 MHz intel Xscale processor
- 128 Mb ram, 64 Mb flash
- GPRS samt WLAN
Der er stor forskel på de testede enheder, både hvad angår pris, størrelse og ydeevne. Det er udelukkende for at vise og teste systemets alsidighed, at det er testet på tre forskellige hardwareenheder.
Som ovenfor nævnt optages der løbende billeder af hele det overkørte areal. Det er derfor også oplagt at videresende en kopi af disse billeder til databasen. Vi valgte dog at tilføje sprøjten et ekstra kamera samt en ekstra computer – billedcomputeren – til at løse denne opgave, fordi sprøjtens egen computer er hårdt belastet, og derfor kunne der blive problemer med sprøjtefunktionen, hvis den også skulle klare en egentlig billedindsamling. Den ekstra billedcomputer afventer et signal fra dataopsamlingsmodulet. Når dette signal kommer, optages et billede af det ekstra kamera, der i øvrigt er af samme type som sprøjtens andre kameraer. Billedet bliver derefter reduceret til en størrelse på 164 x 123 pixel og overført gennem den serielle port til dataopsamlingsmodulet for videre transport og lagring.
Billedhåndteringen i dataopsamlingsmodulet er programmeret som en særskilt ’tråd’. Tråde i software er en teknik, der gør det muligt at afvikle flere opgaver parallelt. Ydermere giver det mulighed for at prioritere opgaverne efter vigtighed. I en almindelig pc er det normalt ikke et problem at afvikle en mængde opgaver samtidig, da man har højt ydende processorer, men i små hardwareenheder som dataopsamlingsmodulet er det nødvendigt at prioritere, hvilke processer, der er vigtigst, så data ikke går tabt.
Dataopsamlingsmodulets vigtigste opgave er at samle data til dokumentation af markoperationer, dernæst kommer billedhåndteringsopgaven. Denne prioritering er valgt, eftersom det er vurderet, at skulle der gå et billede tabt, er dette ikke så kritisk. Prioriteringen mht. datasampling er som følger:
Tråd 1: Stedspecifik dokumentation af markoperationer (højeste prioritet)
Tråd 2: Stedspecifik billededokumentation (laveste prioritet).
Data sendes via internettet til den centrale database, der er udstyret med en webservice. I projektet er Dansk Markdatabase valgt som central database. Første gang dataopsamlingsmodulet kontakter databasen identificeres jobbet ud fra GPRS-telefonens EMEI-nummer. Herefter sørger webserveren for, at de efterfølgende data løbende lagres under den korrekte virksomheds-ID (CVR-nummer) i databasen. Dataopsamlingsmodulet er i udgangspunktet sat op til at sende datapakker hvert 5. sekund. Dette kan ændres efter behov. Båndbredden (på netværket) er her en afgørende faktor. Kører man for eksempel på GPRS netværket, kan der ikke sendes et billede for hvert 5 sekund. Det er forbindelsen ikke hurtig nok til at håndtere. Så mængden af data skaleres automatisk af programmet, afhængigt af båndbredden.
For at kunne bruge de indkomne data i dokumentationsøjemed er der programmeret et nyt modul, der gør det muligt at vise de modtagne dataregistreringer online i en almindelig internet webbrowser. Modulet, der er en overbygning på Markkort Online i Dansk Markdatabase, kan vise kortdata på baggrund af hhv. topografiske kort fra Kort- og Matrikelstyrelsen eller luftoto (Danmarks Digitale Ortofoto©) fra COWI. Visningen kan afgrænses til kun at vise data indenfor en eller flere markpolygoner og/eller data opsamlet indenfor en afgrænset tidsperiode. Data præsenteres grafisk som et punkt pr. observation, hvor den absolutte dataværdi grafisk præsenteres på en farveskala. Det er endvidere muligt at eksportere rådata til videre dataanalyse, f.eks. i regneark.
3.7 Demonstration af det integrerede system
Til demonstrationen af det integrerede system blev der anvendt en 3-rækket cellesprøjte, som er vist i figur 19. I cellesprøjten blev indbygget et modul til automatiseret dataopsamling og forsendelse af sprøjtetekniske data samt håndtering af ukrudtsbilleder. Denne del består af en billedcomputer samt et dataopsamlingsmodul, der samtidig forestår den trådløse dataforsendelse til Dansk Markdatabase.
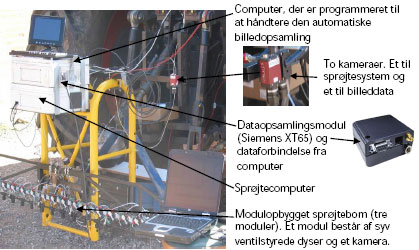
Figur 19. Det integrerede sprøjtesystem bestående af cellesprøjte og dataopsamlingsmodul
Demonstrationen blev gennemført på en sprøjtebane bestående af en 2 meter bred sort gummidug med en længde på 15 meter (figur 20).
På banen blev der pletvis monteret 300 kunstige ”ukrudtsplanter”, der hver havde en størrelse på 25 x 25 mm. ”Ukrudtsplanterne” bestod af et grønt papirmateriale, og sprøjtecomputeren var indstillet til at sprøjte al grøn ”vegetation”.

Figur 20. Sprøjtebanen, der blev anvendt til demonstration af cellesprøjten med påmonteret kunstige ”ukrudtsplanter”
Før selve demonstrationen blev placeringen af de enkelte ”ukrudtsplanter” på banen kortlagt, hvorefter der blev gennemført indledende optimeringskørsler med sprøjtesystemet alene. Det viste sig, at det var muligt at detektere og sprøjte stort set alle sprøjtemål, idet disses grønne farve adskilte sig markant fra banens sorte underlag (figur 21). Præcisionen for sprøjteprocessen er imidlertid afhængig af hastighedssensorens nøjagtighed, idet sprøjtebommen er placeret bag kameraerne, hvorfor detektion og applikation foregår med en vis tidsforskydning.

Figur 21. Præcisionen i sprøjteprocessen
Derimod viste de praktiske forsøg med on-line dataoverførsel via en GPRS forbindelse, at der var praktiske problemer med at overføre de relativt store billeder via dette system. Det var simpelthen ikke muligt at få overført de optagne billeder i realtid til den centrale database, fordi billederne var for store. Undervejs blev det forsøgt at reducere opløseligheden og dermed størrelsen på billederne, men hvis det skal give mening at udføre en analyse på dem med henblik på artsbestemmelse, vil det være nødvendigt med billeder i minimum VGA størrelse. Med en almindelig optik og kameraet anbragt ca. en m over jorden, får man en opløsning på ca. 1 x 1 mm på jordoverfladen, hvilket er minimum for en artsbestemmelse.
VGA størrelsen indebærer billeder på 640 x 480 pixels. Eftersom der er tale om farvebilleder, vil et billede fylde 640 x 480 x 3 = 921600 bytes. En hurtig overførselshastighed for computerens serielle port, som er den normale at anvende ved denne type dataforbindelse, er 115200 bits/sekund. Overførselstiden for ét billede ud gennem serieporten bliver da 921600/11520 = 80 sekunder, eftersom hver byte omfatter 10 bits når start- og stopbit inkluderes. Ved forsøgene blev denne overførselstid anset for at være for lang, hvorfor billederne blev reducerede 4 gange på hver led. Dette var acceptabelt for de foreliggende forsøg, men vil næppe kunne godtages for billeder, som for eksempel skal kunne anvendes til artsbestemmelse.
Ovennævnte forhold giver anledning til overvejelser over, hvorvidt det er muligt at finde en anden løsning på problemet med dataoverførsel. En mulighed – som ikke er afprøvet - er et koncept, hvor alle de indsamlede data, billeder såvel som sprøjtedata, lagres på den lokale computer på køretøjet medens sprøjtningen foregår. Når denne er færdig, og sprøjten kommer indenfor rækkevidden af gårdens trådløse netopkobling, startes overføringen af de indsamlede data automatisk. Dette koncept vil ganske vist ikke indebære realtids online overførsel, men det vil medføre, at operatøren ikke skal huske på at afmontere datakort og selv sørge for at få data overført. Desuden vil et sådant system kunne opnå en betydelig større hastighed på dataoverførslen sammenlignet med det tidligere beskrevne, idet det anvender internettet til at flytte data.
Version 1.0 Oktober 2008, © Miljøstyrelsen.